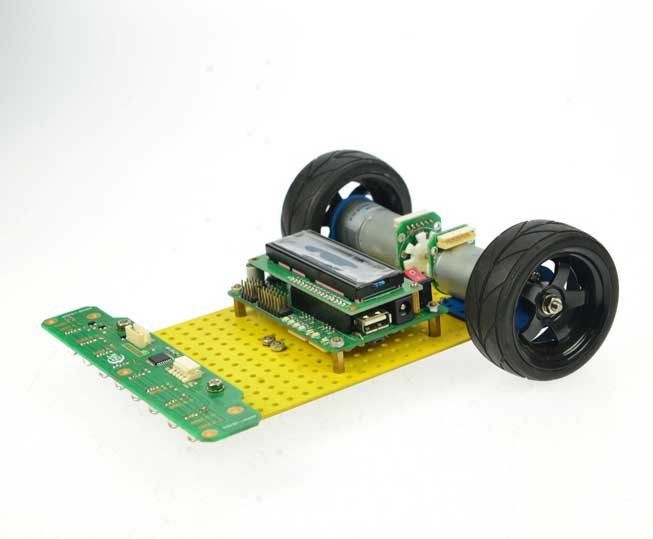
Line Tracer Using 4 Wheels
AdRoiT Accesories
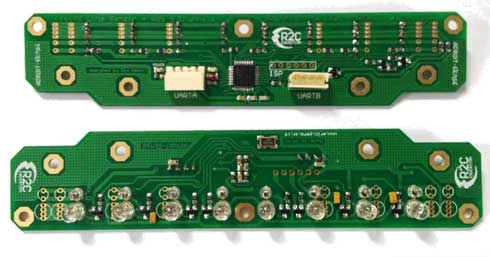
- Sensor Modules
Sensor Modules in ADROIT V1 are divided into two categories; internal and external sensor modules. The internal sensors are available from the controller main module, such as; 3 axis accelerometer, 3 axis gyroscope, 3 axis magnetic compass and battery level monitor. External sensor module can be connected to the main controller module via I2C and/or UART bus. Some sensor modules also can be connected to main controller module via its internal ADC interface up to 7 channels.
- Communication Modules (optional)
Communication module is an optional module that enables the main controller to communicate with other device(s) wirelessly. The module is connected to the main controller via UART or I2C bus. The available wireless communication module in ADROIT V1 is infrared and/or Bluetooth module. Using this module, main controller can send and receive data with other device, such as PC for tele-monitoring and tele-controlling purposes. User can also use this module to connect with the supporting joystick to give a control command to the the robot. We have developed android based application that can be used as a joystick to control the robot remotely via Bluetooth.
.jpg)
- Actuator Modules
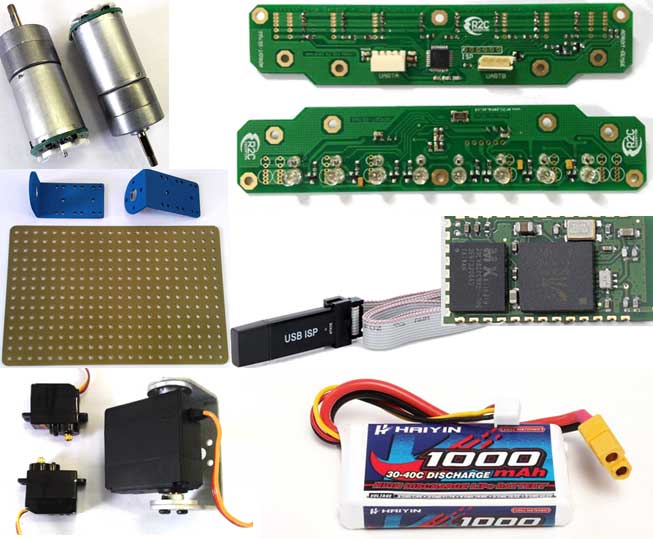
Actuator module in ADROIT V1 can be divided in to two categories; internal and external actuator modules. Internal actuator modules in the main controller consist of dual DC motor drivers and PWM generator for servo motors. The external actuator modules are additional modules that can be connected to the main controller via I2C and/or UART bus.

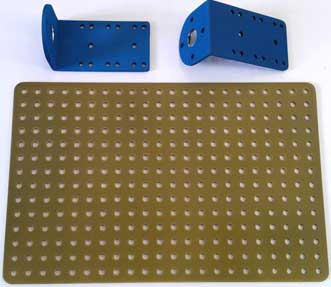
- Additional Mechanical Parts
The mechanical parts consist of basic chassis module, motor supports, optional gripper module and additional user made module. The main component in this module us a matrix of M3 sized holes with 7 mm pitch. This chassis is made from FR4 PCB. User can attach other mechanical modules or the electronic modules within this matrix of holes using bolt and nut or PCB spacer.
- Programming Interface
To program ADROIT V1, we use AVR USB ISP to send the program binary core to the main controller board. The program is made and compiled in PC, and then sent to the robot using AVR programmer tools such as Khazama AVR Programmer, AVR Burner, or AVR dude. Program can be developed using many programming tools such as AVR Studio, Win AVR, Code Vision AVR, etc

Additional converter is needed to convert the standard ISP connector to be match with the controller boad connector configuration. Since the converter does not connect the +5V supply from the USB connector, thus the main controller board needs to be supplied from an external supply when programmed.
- Power Supply
ADROIT V1 uses 1000 mAh lithium polymer (Lipo) battery with the discharge rate of 30-40C. A relatively large discharge rate allows the battery to provide a stable supply current when activates the motors. To provide the best charging method, a balance charger is used to recharge the battery with a charging current of 800 mA. The balance charger used a switching thechnology and can be connected to the wall electricity plug directly with range of 110V to 220V.


Additional converter is needed to convert the standard ISP connector to be match with the controller boad connector configuration. Since the converter does not connect the +5V supply from the USB connector, thus the main controller board needs to be supplied from an external supply when programmed.