
FLoW Project: Adult Size Humanoid Robot
The Humanoid Robot Research Platform Which Is Used to Develop a Dynamical System, Intelligence and Human-robot Interaction in Order To Build Product and Robotics Technology Which are Globally Competitive.
Our research investigated the humanoid robot in topic "FLoW: The humanoid-robot platform research to develop a Dynamical System, Intelligence and Human-robot Interaction in build a product and Robotics Technology which are globally competitive". The long term goal of this research is to build humanoid robot research platform and prototype of humanoid robot(named:FLoW) which has a size like human beings and capable of imitating human motion flexibility, intelligence and interact as a human.
FLoW Humanoid Robot Research Plan
Why humanoid robot as a platform? As a human imitators, make this robot a complex system and the technology that can be developed challenging to studied. Developing humanoid robots will produce a robot which can replace human beings in same time and space with human.
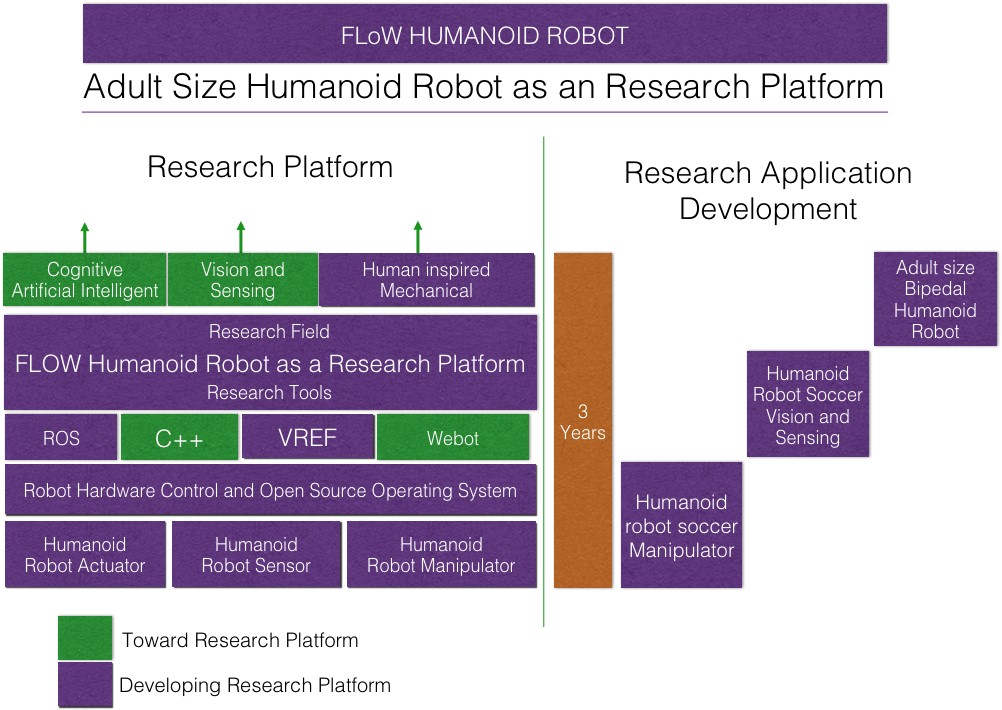
The spesific target every year from the university research which proposed with the method is follow:
- Parallel manipulator mechanism design and manufacturing processs which include the part as: eyes, head, neck, hands, body, and the legs. As well as the kinematics model and the electronic system for control the robot with multivarible state space model. Modify and implement the Floor Projection Center of Mas(FCoM) method and Zero Moment Point(ZMP) for control the robot balance in order that the robot can be stand.
- Build a computing platform, sensor system, and modeling the dynamic movement model (locomotion) such as standing, walking, hand movement, bending, turing, and eye movements. Studying scenarios, trajectori and coordination every movement to optimize efficient control system and pose of any joint and link through uitilization of inertial measurement unit (IMU) sensor. And still maintain stability and balance th robot.
- Build a sensor and a model base on video and audio perception. Develop a voice recogniton system so the robot can be able to interact with human with the voice(including sound generation technique). developing a enviroment mapping system, object recognition, and obstacle avoidance techniques and computer vision as stereo camera processing, optical flow, 3D reconstruction and the transformation of vision to mechanical robot.
Futher development after third year, includes building intelligence platform support the dovelopment of speech understanding, gesture understanding, and the robot ability for adapt with the enviroment. Develop the robotics library and robotics operating system. The final traget is prototype of humanoid robot which capable of imitating human motion flexibility, intelligence and interact as a human. This robot is expected to replace the human dimensions on a working enviroment which has the provided for the human enviroment.




