
FLoW OS: Robotics Operating System
Real Time Operating System Development Based on Microkernel for Robotics Applications.
Robustness and time precision are the main issues on operating system development for real time application, such as robotics. Robotics may use microkernel design for its core to achieves this requirements. L4, one of the most reliable microkernel, uses simple and small design on its kernel and API as its services which provide better system performance.
The operating system used in robotics application must meet several requirements, such as small size, simple internal process and mechanism but tough, system robustness and precision in time. Microkernel is the most appropriate kernel model to be implemented to satisfy these requirements. Microkernel is choose as the core of operating system and provide effective hardware management and kernel service.
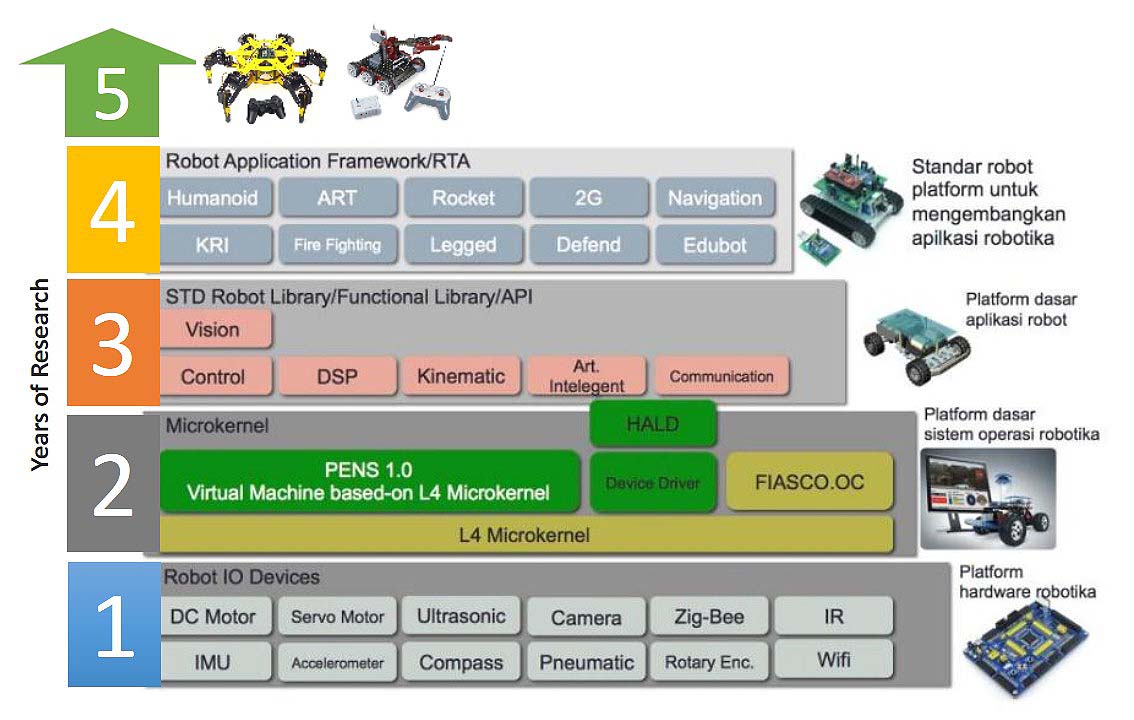
FLoW Operating System Research Framework
In general, robotic operating system consist of the kernel, user programs, and hardware drivers. A runtime environment may be developed as a container for specific applications and provided by advanced API and peripheral drivers. Microkernel isolates the hardware from the user programs. In user level, programs must ask microkernel services to begin direct hardware access. The kernel interface must designed and implemented effectively to reduce performance overhead while performing hardware interface and access.
Microkernel also become the core of user activity inside operating system. Robotics operating system, through microkernel is able to perform several tasks concurrently. This concurrency could increase user task performance and efficiency while using computer and hardware resources. Then, microkernel have to serve user tasks through good API design and implementation.




